
课程

基于NeRF/3DGS的隐式建图或SLAM研究
本课题将结合深度传感器,研究更高质量、更逼真的3D图像渲染。
工科
SCI
计算机科学与技术
计算机视觉
机器人
NeRF/3DGS
SLAM
Planning
申请匹配
咨询客服分享给朋友: 


课题详情
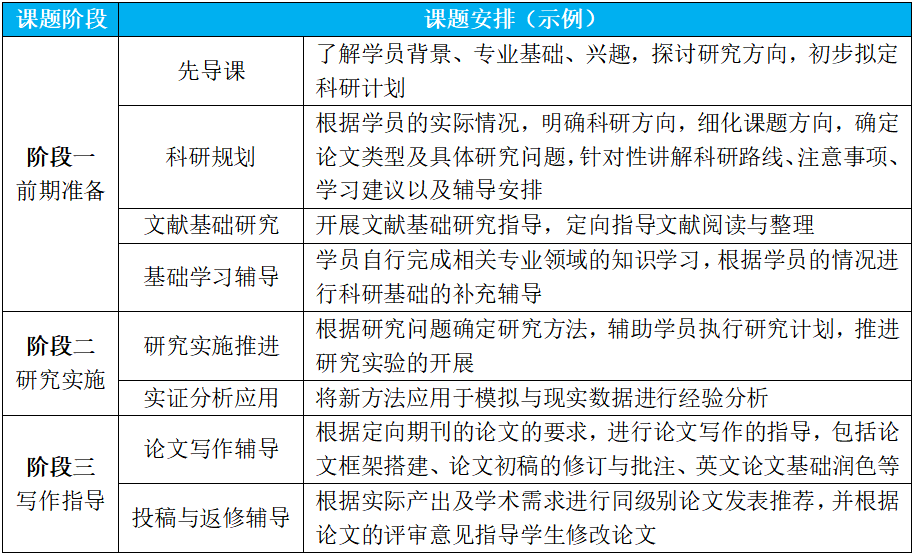
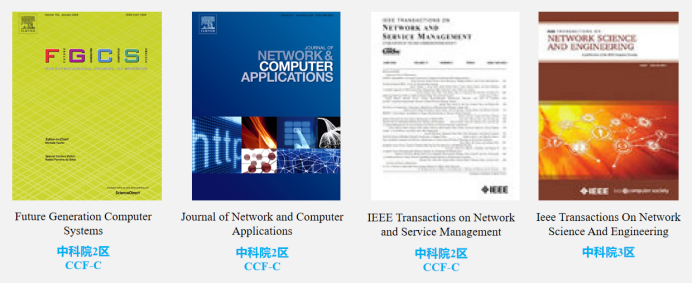
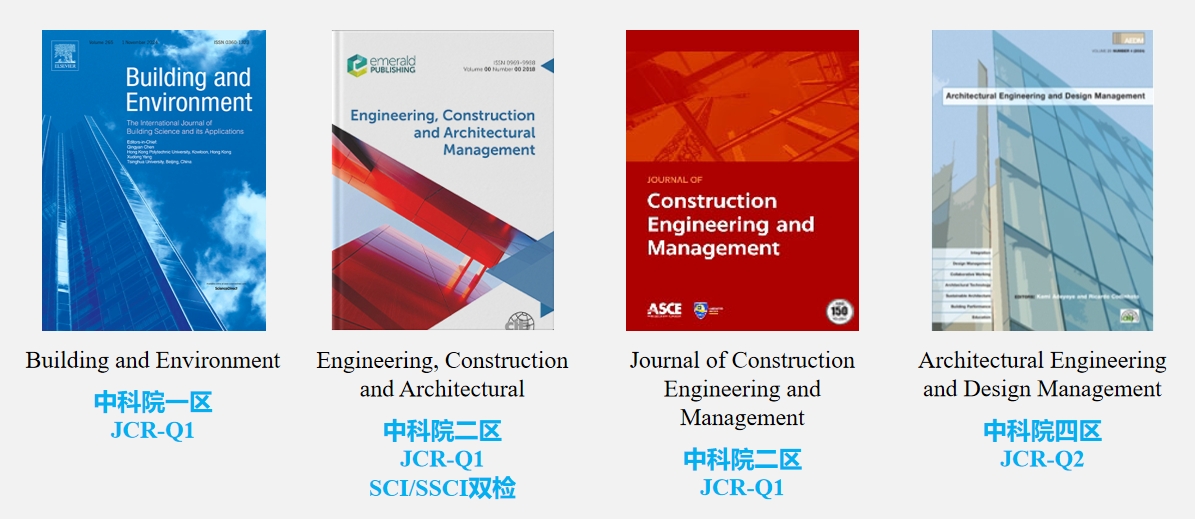
【课题推荐发表期刊】

【课题背景】
NeRF/3DGS是一种用于表示和渲染复杂3D场景的方法,它通过学习从不同视角观察到的2D图像来生成3D场景,并渲染生成逼真的图像,是计算机视觉和机器人领域的前沿方向。
本课题将结合深度传感器,研究更高质量、更逼真的3D图像渲染。
【课题方向参考】
结合深度传感器(雷达,深度相机等)构建更高质量的NeRF/3DGS
结合NeRF/3DGS的SLAM方法
结合NeRF/3DGS的重定位方法
【适合人群】
主修计算机科学或自动化专业学生,有一定编程能力和数学基础,熟悉Python或C++。
【课题收获】
高质量论文一篇(SCI/CCF定向期刊)
SCI期刊投递与发表指导
结业证书
【导师介绍】
Dr. Liu,QS20高校在读博士
以第一作者身份发表RAL论文2篇、ICRA论文1篇、IROS论文1篇
长期担任RAL, ICRA, IROS, TIM, TMECH审稿人
获发明专利授权1项
有带过研究生和本科生进行科研项目,具备丰富的英文写作和论文指导经验
善于启发学生思考,给出解决问题方案
【课题安排】
研究周期预估六个月左右,具体视学员情况调整。
【推荐阅读】
课题导师
查看详情 >

Dr. Liu KY81668
QS20高校博士
机器人自主系统,建图与规划,隐式建图


立即添加好友,了解更多


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}